OpenStreetMap France était cette année partenaire de l’événement GéoDataDays, les journées nationales de la géographie numérique. L’événement, organisé par l’AFIGÉO et DécryptaGéo, s’est tenu les 2 & 3 juillet à Arras.
événement
OSM à la Fête nationale du breton
L’équipe de openstreetmap.bzh (et sa carte localisée en breton) sera présente à la Fête nationale du breton, dans le Pôle numérique.
Retrouvez-nous les samedi 8 et dimanche 9 juin à Langonnet. Nous vous invitons à participer à un atelier consacré à OpenStreetMap à 15h et 16h.
Lire la suiteLe programme du SotM-FR 2019
Le programme définitif du State of the Map France 2019 est disponible sur le site de l’événement !
Lire la suiteOSM-FR partenaire de GeoDataDays 2019
OpenStreetMap France est partenaire de l’événement GéoDataDays, les journées nationales de la géographie numérique, organisé par l’AFIGEO et DécryptaGéo.
Lire la suiteRetour sur le SotM-FR 2018 de Bordeaux (suite)
L’association OpenStreetMap France vous propose de vous replonger au cœur du dernier State Of The Map France qui s’est déroulé à Bordeaux du 1er au 3 juin 2018. Nous avons déjà publié 2 articles fin 2018 et, comme promis, voici le 3ème article qui reprend les interventions du samedi 2 juin, regroupées par salle.
Lire la suite
Mapathon Brest-Madagascar le 13 décembre à l’UBO OpenFactory
Venez nous aider à cartographier les espaces de Madagascar sur OpenStreetMap, la carte du monde collaborative et libre
Inscriptions souhaitables : https://www.eventbrite.ca/e/billets-mapathon-a-brest-ubo-open-factory-52931082292
CartONG organise un mapathon centré sur Madagascar avec l’UBO Open Factory et Tiriad et les groupes locaux. Vous pourrez découvrir la cartographie participative et humanitaire dans OpenStreetMap : pas besoin d’être un expert, c’est accessible à tout le monde ! Comme nous aimons lier l’utile à l’agréable, nous vous proposons de partager un repas commun qui sera lui aussi contributif et collaboratif: l’idée étant que chacun ramène un plat à partager avec tout le monde !
Salon avec OSM lyon
L’équipe d’OSM Lyon sera présente aujourd’hui et demain samedi 24 novembre au salon « Aujourd’hui pour demain » organisé par la métropole de Lyon. Lire la suite
Retour sur le SotM-FR 2018 de Bordeaux (suite)
L’association OpenStreetMap France vous propose de vous replonger au cœur du dernier State Of The Map France qui s’est déroulé à Bordeaux du 1er au 3 juin 2018. Nous avons déjà publié un premier article le mois dernier et, comme promis, voici le 2ème article qui reprend les interventions du vendredi 1er juin. Nous allons vous présenter aujourd’hui les présentations du reste de la journée du vendredi, de 11h30 à 17h30, regroupées par salle.
Retour sur le SotM-FR 2018 de Bordeaux
L’association OpenStreetMap France vous propose de vous replonger au cœur du dernier State Of The Map France qui s’est déroulé à Bordeaux du 1er au 3 juin 2018. Pour cela, nous allons publier plusieurs articles qui vont reprendre les présentations du séminaire.
Vous allez pouvoir revoir le début de matinée du vendredi. Dans un premier temps, vous pourrez revivre le discours d’accueil, tandis qu’Irène Hirt et Matthieu Noucher nous expliqueront pourquoi « OpenStreetMap est mort, vive OpenStreetMap ! » ; et dans un deuxième temps, nous verrons les trois Lightning talks de la fin de matinée.
Mais commençons tout d’abord par cette petite vidéo qui synthétise ces 3 jours passés à Bordeaux.
Vous êtes dans le bain ? alors poursuivons par le discours d’accueil et la présentation intitulée « OpenStreetMap est mort, Vive OpenStreetMap ». La vidéo suivante reprend les questions/réponses de la précédente présentation.
A l’issue de cette première présentation, nous vous proposons de revoir les 3 lightning talks de la matinée :
- Créer en 2 ans une carte OSM localisée en exploitant l’esprit collaboratif (20), avec une petite introduction improvisée sur le projet EducOSM.
- Itinérance cartographique à travers les Andes: Nomad map (40) : cette vidéo présente un projet de voyage à vélo dans 3 pays d’Amérique du Sud dont l’objectif est de faire le lien avec les communautés OSM locales. Vous pouvez également consulter la présentation.
- Utilisation d’OSM dans un projet environnemental et pluripartenaire : DéCiSif la vidéo et la présentation (.pdf).
Nous espérons que cet article vous plaira et vous retrouverez une nouvelle série de présentations dans un prochain article consacré au State Of The Map France 2018 de Bordeaux.
State of the Map 2018 à Milan (28 au 30 juillet)
I. Introduction
Un State of the Map vraiment mondial avec plus de 400 participants venant de plus de 50 pays différents, représentant 150 organisations, les Italiens (régionaux de l’étape) étaient en nombre évidemment, et les plus grandes délégations venaient vraisemblablement d’Allemagne, des États-Unis, du Royaume-Uni, de France ou de Suisse, puis à un degré moindre d’Inde, de Belgique, de Roumanie, de Chine et de Taïwan, beaucoup de pays représentés par deux ou trois personnes seulement, et encore plus par une seule personne.

Un programme très riche avec 3 fils principaux à suivre (voire 4 ou 5 avec les ateliers et les ‘lightning talks’) : nous en avons sélectionné une dizaine pour vous donner un aperçu, et vous en trouverez les résumés plus bas dans cet article.

En quelques mots rien à dire sur l’organisation, vraiment bien ! Les tee-shirts rouges de service étaient nombreux, serviables et disponibles, tout a très bien fonctionné dans le cadre prestigieux du Politecnico de Milano. Le samedi soir, l’invitation au “Old Fashion” dans le Parco Sempione autour du Palais des Sforza était vraiment agréable également.

II. La tendance générale
Si l’amalgame entre les différents publics OSM semblait réussi, on ne pouvait pas ne pas remarquer en premier l’intérêt confirmé des ‘grosses boîtes’ pour OSM ainsi que la présence de beaucoup de professionnels ! S’il est normal de voir Mapbox ou Mapillary un peu partout à cet endroit, on écarquille un peu les yeux quand on voit aussi Facebook, Microsoft, ou Telenav et d’autres encore, non seulement sponsors de l’événement mais aussi présentant leurs équipes, leurs engagements, ou leurs réalisations dans OSM ! OSM devient une sorte de pivot, que personne ne veut négliger (en ligne de mire, le marché de la navigation routière ?), Apple était là aussi. Et pour ces acteurs de premier plan, une orientation vers l’analyse et l’amélioration de la couverture et de la qualité des données, un peu de ‘green-washing’ peut-être, mais aussi un intérêt certain pour les données et le modèle OSM !
En deuxième, arrivent aussi, et en partie du fait de ces acteurs majeurs, des méthodes et/ou outils d’IA : reconnaissance automatique d’images, traitement automatique d’imagerie aérienne, data-science. Plusieurs présentations montrant les possibilités offertes par le Machine Learning pour améliorer la donnée OSM (des explorations très actives de ces techniques), souvent comme pré-traitements automatisés, avant de faire appel à des vérifications ou validations manuelles de la communauté OSM (mais parfois des “communautés” professionnelles : organisées, managées, payées). Grande efficacité sur les tâches fastidieuses de la contribution grâce à ces techniques mises en œuvre et des réalisations très applaudies.
En troisième, les centres d’intérêts récurrents sur OSM : sur la thématique des transports par exemple, sur la diversité (homme/femme) des publics et des contributeurs OSM, sur l’analyse des données. Là encore, les différentes présentations étaient riches en retours d’expériences de tous horizons, signe que ces sujets sont encore au centre de la communauté.
En quatrième, l’amélioration continue des outils de contribution et du schéma de données. On notera les efforts menés par les différentes équipes de développement pour proposer toujours une meilleure expérience utilisateur, de nouvelles fonctionnalités, ou adapter l’architecture cœur du projet pour soutenir son développement sur le long terme.
En dernier, souvent le côté très sympa, offert par la liberté qu’offre OSM, la richesse de l’écosystème : un peu de tout, du rêve, des artistes, des communautés vivantes, des militants, des artisans engagés au service des autres et du bien commun !
III. Quelques résumés de présentations
1) Can we validate very change in OSM ?
Le vandalisme sous différentes formes (graffiti, obscénités, publicités, …) ne représente que 0.2% des modifications, mais 2% des éditions sont de mauvaise qualité (les nouveaux contributeurs en sont responsables sur 30% lors de leurs 10 premières contributions, sachant qu’il y a 20 000 nouveaux contributeurs par mois).
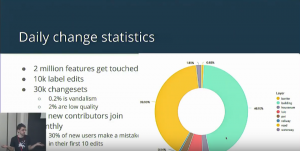
Pour prendre en compte ceci, Mapbox met en place des outils pour analyser et détecter les changesets suspects, et les corriger avec une intervention humaine, et à travers la plateforme https://osmcha.mapbox.com/.
2) Alternative perspectives through artistic interpretations
Un travail original et artistique sur les données OSM de la part de Hans Hack, avec plusieurs réalisations :
- https://interaktiv.morgenpost.de/trump-mauer-groessenvergleich/ permet de se rendre compte de la taille du mur que souhaite réaliser Trump en déplaçant l’ empreinte de ce mur sur un fond de carte européen.
- http://www.hanshack.com/pointnemo/ visualise les points en Allemagne situés le plus loin possible d’une route, ceci pour savoir où trouver de la tranquillité !
- http://www.hanshack.com/sorted-cities, proche d’un travail qui avait été réalisé par un contributeur français sur les cathédrales, cette réalisation présente des posters de formes de bâtiments (écoles, lieux de cultes, prisons, …) du plus grand au plus petit.
Sebastian Meier fait un travail de data-visualisation et a par exemple cherché à présenter nos distorsions cognitives sous formes de distorsion de cartes, voir l’ensemble de ses réalisations à partir de http://www.sebastianmeier.eu/
3) Pinpointing the power grid
Mise en œuvre de l’IA pour détecter automatiquement à partir d’imagerie aérienne, le réseau de transport électrique (pylônes, transformateurs, …) dans 3 pays : Pakistan, Nigéria, Zambie. Ces techniques de Machine Learning permettent d’améliorer l’efficacité des contributeurs OSM d’un facteur 33 (!), en préparant toute la partie fastidieuse (sélection des images susceptibles de contenir des objets du réseau électrique, pointage dans l’image de l’objet à mapper) au contributeur qui n’a plus que le mapping proprement dit à réaliser, et un travail de contrôle.
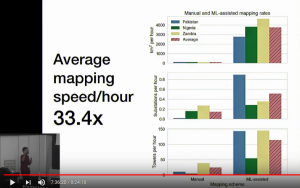
Ces techniques sont reproductibles dans d’autres domaines. Ce travail spécifique est financé par la World Bank et par ailleurs https://www.developmentseed.org/ réalise beaucoup d’autres choses.
4) Large Scale Deep Learning for Map Making
Telenav et OpenStreetCam présentent la méthode mise en place pour analyser automatiquement et à grande échelle les images d’OpenStreetCam (qui contient actuellement 146 millions d’images) :
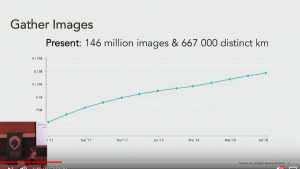
Si l’œil humain est très bon pour analyser les images, analyser des grandes quantités d’images prend énormément de temps et est très fastidieux. Donc reconnaissance automatique d’images par de l’AI. Une vingtaine de personnes est employée à analyser des images pour en repérer des motifs (feux tricolores, panneaux routiers, …), ceci pour créer des ensembles de données-témoins (‘tagged datasets’) au travers d’un outil ad-hoc : l’opération consiste à créer un rectangle autour de l’objet identifié (par exemple un ‘feu de circulation’) et de le qualifier comme tel (‘feu de circulation’ dans notre exemple).

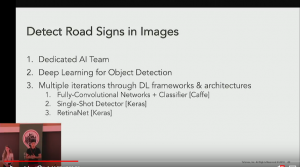
Cet ensemble témoin étant constitué, l’apprentissage peut commencer (DeepLearning). Plusieurs solutions sont utilisées pour finalement être capable de reconnaître automatiquement et très rapidement plus de 55 types de signalisation routière.
Mais l’équipe de Telenav ne s’en tient pas là : ils souhaitent aussi rapprocher les résultats obtenus avec des valeurs de tags dans OSM, par exemple pour vérifier qu’un panneau de limitation de vitesse à 30 km/h correspond bien à une voie avec le tag “maxspeed=30”. Plusieurs difficultés ont été surmontées : déduire de différentes paramètres la localisation exacte de l’objet en fonction de la localisation de la prise de vue de l’objet, regrouper les résultats de plusieurs photos pour identifier lorsque cela est possible un seul objet et le localiser à un seul endroit, et enfin identifier la voie sur laquelle l’objet s’applique pour enfin pouvoir comparer les tags de la voie avec l’objet reconnu sur les images !
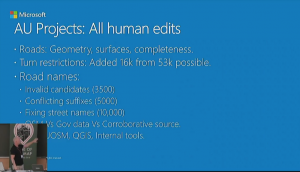
5) Building up the Microsoft Open Maps Team
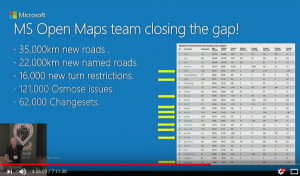
Un peu de green-washing pour Microsoft (MS a racheté github récemment et se présente comme étant l’acteur contribuant le plus dans les projets OpenSource au monde) ? Mais intéressant quand même de voir de quelle manière MS prend le virage OSM. L’équipe OpenStreetMap de Microsoft est constituée de 18 personnes (Seattle et Serbie), est très récente (nov 2017) et s’est fixé comme objectif de travailler à l’amélioration de la qualité et la couverture de la carte routière de l’Australie. C’est de la contribution manuelle en équipe, managée et organisée, en utilisant les outils de la communauté OSM (éditeurs, osmose, osmcha, etc.) :
En un an environ, ils sont arrivés à certains résultats :
Par ailleurs deux autres présentations de Microsoft au cours de ce State of the Map : Going to Production with OpenStreeetMap at Microsoft, Robot Tracers – Extraction and Classification at scale using & CNTK
6) 3D Beyond Buildings

OpenStreetMap c’est bien plus qu’une carte, ce sont des données géographiques ! Cette présentation de Tobias Knerr était l’occasion de voir qu’on peut aller plus loin en proposant du rendu 3D à partir des données OSM, à l’aide de l’outil OSM2World. L’occasion de montrer le fonctionnement de l’outil, et surtout les nombreux types d’objets gérés : bâtiments, occupation du sol, routes et voies ferrées, bancs et panneaux publicitaires… Si vous avez envie d’apporter votre expertise, que ce soit en modélisation 3D, ou sur une thématique spécialisée d’OSM, le projet est ouvert et l’équipe recherche des contributeurs.
7) OSM at Facebook
Dans la série retours d’expériences de grandes entreprises, Facebook, qui était déjà intervenu lors de la précédente édition au Japon, montre ses avancées en matière de contribution à OpenStreetMap. Le réseau social a développé de nombreux outils pour détecter automatiquement le réseau routier à partir de photographies aériennes (là aussi à partir d’IA), et mis en place un ensemble de procédures de validation et intégration manuelle des données, en lien avec les communautés locales, afin de compléter OSM. Cela a aboutit à 244 000 kilomètres de routes ajoutés en Thaïlande et d’autres pays. La société utilise désormais OpenStreetMap comme source de données dans ses applications principales sur 3 quarts des pays de la planète, pas mal comme réutilisation !

8) Advertising mapping : using OpenStreepMap for the protection of landscape

Les dispositifs publicitaires sont des objets omniprésents dans l’espace public. Une réglementation très précise (et très compliquée) existe, en France en tout cas, pour contraindre leurs dimensions/nombres/lieux d’installation etc. mais celle-ci n’est souvent pas respectée, en cause une certaine passivité des pouvoirs publics, occupés à autre chose, et surtout des publicitaires/annonceurs, sans complexes, qui cherchent à en profiter au maximum, et se croient souvent au-dessus des lois. Par ailleurs un certain activisme associatif et citoyen existe en France pour défendre le cadre de vie, et lutter contre la pub. Pour permettre à tous de participer à la défense du paysage, bien commun de la nation, contre l’invasion des dispositifs publicitaires, il serait utile d’inventorier et qualifier ces dispositifs, et OSM est l’outil parfait pour ceci ! Cet inventaire permet de sensibiliser le public et les pouvoirs publics à cette pollution visuelle, et permettrait à terme de disposer des données nécessaires pour évaluer les politiques publiques locales en terme de publicité extérieure. Dans cette idée, un contributeur grenoblois nous présente comment qualifier ces dispositifs publicitaires dans OSM, et les outils de contributions existants pour faciliter cette tâche. La France, particulièrement soumise à cette pollution au quotidien, a commencé à référencer ces dispositifs publicitaires, mais tant reste à faire ! Au niveau international cet inventaire est encore très balbutiant, l’occasion donc de se lancer, essayez vous aussi d’utiliser le tag ‘advertising’ ! La cartographie des dispositifs publicitaires pour la défense du paysage.
9) Pic4Review : contribution ludique à partir de photos

Afin de faciliter la réutilisation des photos de rues libres de droits issues de Mapillary, OpenStreetCam et Flickr, Adrien Pavie nous présente l’outil Pic4Review. Il s’agit d’un nouvel éditeur OSM qui facilite l’ajout de détails sur des objets existants à l’aide de photos. Le principe est simple : on choisit une mission sur une zone, et chaque objet à compléter est présenté avec les photos disponibles aux alentours. On peut par exemple renseigner si un passage piéton est accessible en fauteuil roulant, si un arrêt de bus est abrité, le type de parking à vélo… La contribution est rendue ludique par un système de points et un tableau des meilleures contributions par thématiques. Le projet est ouvert aux contributions, que ce soit retours d’utilisateurs, traductions ou développement de nouvelles fonctionnalités !
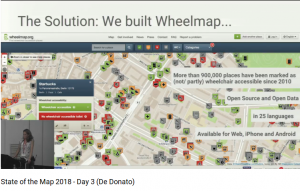
10) The new Wheelmap: Joining forces in accessibility mapping – feat.: “I Wheel Share”
Le site wheelmap.org a été crée il y a 8 ans pour améliorer l’information (et donc la vie quotidienne) des personnes à mobilité réduite souvent dans l’inconnu sur l’accessibilité des lieux. Depuis, le tag ‘wheelchair’ a été utilisé plus de 1,3 millions de fois dans la base de données OSM, et permet maintenant de connaître le niveau d’accessibilité de plus de 900 000 lieux, grâce à l’implication de nombreuses communautés. Ce tag a été depuis enrichi de nombreux nuances. Par ailleurs cette problématique universelle de l’a11y (accessibility) est partagée par de nombreux groupes militants à travers le monde. Mieux encore, les données d’accessibilité de différentes sources sont maintenant agrégées et rendues disponibles à travers une infrastructure commune (accessibility.cloud), donnant accès à travers une API unique et un modèle de donnée très détaillé, à plus de 1,6 millions de lieux, et leurs caractéristiques d’accessibilité. Sur cette API, la startup parisienne I Wheel Share (présentée par son CTO Florian Lainez) développe des services, et notamment Wilson, un chatbot capable de répondre à toutes sortes de questions pratiques, et de localiser par exemple les ressources (toilettes, cinémas, services) à proximité et accessibles aux PMR. De nombreux partenaires sont impliqués dans le développement de cette startup.
Une utilisation militante et sociale très intéressante d’OSM !
11) Completing the Map with Street-level Imagery
Présentation des nouveautés de Mapillary, qui rappelons-le est une plateforme contributive collectant des photos géo-localisées du monde entier, ces photos contribuées par la foule sont ensuite mise à la disposition de tous sous une licence libre (CC-BY-SA) et sont particulièrement appropriées pour aider à la contribution OpenStreetMap. Actuellement 326 millions de photos dans leur DB. La plateforme (et son ‘Tasker’) permettent d’organiser la contribution “photo” à l’échelle d’un territoire découpé en zones sur lesquelles est rendue visible la progression de la contribution. Pour dynamiser l’utilisation, Mapillary a recours à des concours #CompleteTheMap et de la gamification.
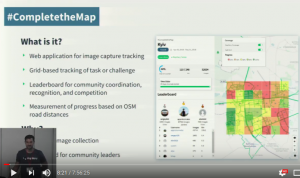
Pour revenir à la contribution OSM, ces photos sont visualisables sur leur plateforme (un exemple, même exemple plus près) et aussi dans l’éditeur ID.
Mapillary fait de la reconnaissance automatique de modèles dans les images et est capable alors de sélectionner les photos avec un certain modèle (par exemple des passages piétons), mais une très grande quantité de modèle sont reconnus (parmi lesquels ‘Billboard’ voir ci-dessous).

La plateforme Mapillary permet aussi d’autres modes de contribution, par exemple pour contrôler que leur moteur de reconnaissance d’images marche effectivement bien pour les panneaux de signalisation routière.
Mapillary fait un business de ces compétences dans le domaine, mais joue le jeu de la communauté OpenStreetMap en permettant la réutilisation des images téléversées par les contributeurs bénévoles, et en offrant des outils de contribution très avancés.
12) Flying ferries and moving pavements? Pedestrian routing on rare modes of transport
Une présentation originale d’un contributeur issu du Grand Duché (du Luxembourg) qui s’intéresse aux modes de transports rares des piétons et au calcul des itinéraires qui les empruntent, les moteurs d’itinéraires classiques les ignorant la plupart du temps. Quelques exemples : route=ferry (bac prenant des piétons), bridge=movable+bridge:movable=transporter (voir photo ci-dessous), conveying=*+highway=footway ou highway=step (tapis ou escalier roulant), highway=elevator (ascenseur), route (ou railway)=funicular (funiculaire), aerialway=cable_car ou aerialway=gondola (transport par câble en ville, appelés à se développer)… Bref l’idée est de savoir prendre en compte tout ça et de savoir favoriser soit le temps de transport, soit le coût, soit la distance…

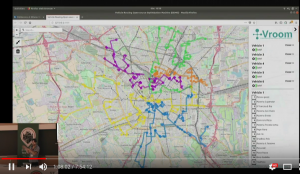
13) Solving vehicle routing problems with OpenStreetMap and VROOM
La solution VROOM s’attaque aux problèmes d’optimisation d’itinéraires pour les flottes de véhicules, en se basant sur les données OpenStreetMap, et le calcul d’itinéraires OSRM : commencer par résoudre le problème ‘classique’ de la tournée du facteur, mais aussi les variantes avec des contraintes de capacité, de temps, de point de départ ou d’arrivée, de flotte de véhicules, etc. Du calcul, des heuristiques, des règles ad-hoc, et des ajustements assez sioux permettent d’optimiser la solution, et de calculer rapidement, ceci pour permettre la montée à l’échelle. Voir https://verso-optim.com/
IV. En conclusion
Cette édition 2018 du State of the Map a été, comme chaque année, un brillant succès. L’événement a réuni les contributeurs OSM de tous horizons et les nouveaux acteurs qui s’intéressent au projet, le tout dans le prestigieux cadre de l’école Polytechnique de Milan. La communauté se montre toujours aussi innovante dans les cas d’usages et les outils proposés autour des données.
La prochaine édition se tiendra à Heidelberg en Allemagne, du 21 au 23 septembre 2019. Nous espérons vous y voir nombreux !
Voir les vidéos de conférences ici
Voir le wiki SotM 2018 ici
Notez bien : article écrit en collaboration par plusieurs membres de l’association OpenStreetMap France qui étaient présents à Milan.