La Gare de Felletin, bâtiment emblématique de la ville a été récemment acquis par Quartier Rouge, une association du village. L’association souhaite prendre le temps de réfléchir à la manière dont elle peut rénover le bâtiment ainsi que mettre en valeur le lieu dans la ville. Elle a donc construit l’événement annuel « horizons géographiques » autour des questions d’habitat et communs par la thématique
« Convoquer par notre présence un espace commun »
Ce lundi 23 juillet matin, l’association a proposé à Marin Baudin, paysagiste au CAUE de la Creuse et l’architecte Nicolas Dahan de venir faire une ballade et discussion autour du quartier de la Gare. Une vingtaine de personnes ont participé aux échanges.
Le lundi après midi, nous avons organisé une cartopartie nourrie d’échanges de la matinée. Une quinzaine de personnes ont participé à l’atelier. Étaient présent, des informaticiens, cartographes, paysagistes, universitaires, curieux, habitants, urbanistes et animateurs de radio.
Déroulé
Après une introduction autour de la cartographie générale, de google map à waze en évoquant les différents lieux où se niche l’information géographique, nous avons échangé sur ce qu’apporte OpenStreetMap vis-à-vis des services existants, l’histoire du projet et les défis actuels.
Par la suite, nous avons identifié des thématiques sur lesquelles les participant.e.s ont souhaité travailler. (30mn)
Nous avons constitué des petits groupes de 4 / 5 personnes par thématiques.
Chacun, équipé de tablettes en bois prêtées pour l’occasion a pu réaliser la cartographie sur papier sur une base d’atlas produits avec Fieldpapers (1 heure). Au retour de la ballade, nous avons saisi les informations sur ID , l’éditeur en ligne, en créant des comptes par utilisateurs l’occasion (45 mn)
Relevés Mapillary réalisés par l’un des groupes sur place.
Les envies cartographiques exprimées.
Les participants ont formulé des envies cartographiques variées autour de la gare et de Felletin.
Cartographie des parcelles autour de la gare pour avoir une meilleure idée des espaces disponibles.
Cartographie des ateliers de la gare et des artisans dans l’idée de produire un plan local.
Cartographie pouvant être intéressante pour des installations artistiques dans Felletin sous condition d’accord des personnes concernées. Des prises de vue 360° pour Mapillary ont été réalisées pour l’occasion
Cartographie des bancs de la ville il est important de savoir où sont les endroits propices à la banturle mot occitan limousin décrivantl’art de jouir à ne rien faire. Le sens varie selon les région, je m’en suis aperçu lors du State Of The Map – Fr 2018.
Cartographie des arbres, plantes et fleurs autour de la gare. Il est intéressant de noter que l’inventaire botanique limousin a recensé de nombreuses plantes très spécifiques dont l’origine est liée aux graines qui arrivaient avec les trains de marchandise.
Cartographie du trajet en train Felletin Busseau sur Creuse pour préparer un événement de la fin de semaine, un voyage en train commenté.
Observatoire de l’habitat pour suivre le travail initié en 2014 par un habitant sur la vacance du bâti.
En bilan
La journée riche en échanges a permis de donner un premier regard collectif sur le projet OpenStreetMap et de réfléchir à comment celui-ci peut appuyer les initiatives locales. Nous n’avons pas pris le temps de saisir toutes les informations recensées pendant l’après midi, préférant plus échanger sur les usages possibles à partir d’OpenStreetMap. Cela est tout aussi important.
D’autres événements auront donc lieu dans la montagne limousine suite à cette journée. Merci aux personnes ayant organisé le SOTM-FR 2018 qui nous a donné goût à organiser cet événement.
Merci aux voisins designers de Détéa pour leurs tablettes confortable pour cartographier debout 🙂
tablette de relevés terrain.
Les projets mentionnés
L’écosystème OpenStreetMap étant vaste, plusieurs projets ont été mentionnés dans lors de cette rencontre.
Umap: site pour réaliser une carte publique personnalisée pour mettre en valeur des informations spécifiques d’OpenStreetMap simplement ou recenser des informations qui n’auraient pas leur place dans le projet.
MaposmaticSite web pour réaliser des grands plans (A0) depuis OpenStreetMap.
fieldpapers site web pour faire simplement un plan d’une zone sous forme d’Atlas.
QGISlogiciel libre de SIG multi usage relativement bien connecté à OpenStreetMap (via le plugin QuickOSM, merci à 3liz pour cette réalisation).
STAMENfonds de cartes originaux (type pastel et toner) issus d’OpenStreetMap réalisé par des designer
openstreetmap.bzh carte bretonne issue de OpenStreetMap. Certaines personnes souhaitent voir apparaître un équivalent en langue occitane.
Mapillary Un équivalent libre, personnalisé et plus poussé pour les utilisateurs que google Street View. Cependant, celui-ci n’est pas, pour le moment aussi riche que ses concurrents directs.
Live OpenStreetMapaffichage en direct des contributions OpenStreetMap à l’échelle mondiale.
Hotosm : projet humanitaire autour d’OpenStreetMap.
Map compare : pour comparer OpenStreetMap avec Bing, google map, here ou Apple maps.
YoHours éditeur d’heures d’ouverture (Merci Adrien Pavie pour l’outil).
Maps.me une solution de cartographie simple, libre et hors ligne où il est possible de télécharger les données sur son téléphone.
Un State of the Map vraiment mondial avec plus de 400 participants venant de plus de 50 pays différents, représentant 150 organisations, les Italiens (régionaux de l’étape) étaient en nombre évidemment, et les plus grandes délégations venaient vraisemblablement d’Allemagne, des États-Unis, du Royaume-Uni, de France ou de Suisse, puis à un degré moindre d’Inde, de Belgique, de Roumanie, de Chine et de Taïwan, beaucoup de pays représentés par deux ou trois personnes seulement, et encore plus par une seule personne.
Photo 1 : la photo des participants au SotM Milan 2018
Un programme très riche avec 3 fils principaux à suivre (voire 4 ou 5 avec les ateliers et les ‘lightning talks’) : nous en avons sélectionné une dizaine pour vous donner un aperçu, et vous en trouverez les résumés plus bas dans cet article.
Photo 2 : l’amphi ‘de Donato’ lors de la session d’ouverture
En quelques mots rien à dire sur l’organisation, vraiment bien ! Les tee-shirts rouges de service étaient nombreux, serviables et disponibles, tout a très bien fonctionné dans le cadre prestigieux du Politecnico de Milano. Le samedi soir, l’invitation au “Old Fashion” dans le Parco Sempione autour du Palais des Sforza était vraiment agréable également.
Photo 3 : Politecnico di Milano
II. La tendance générale
Si l’amalgame entre les différents publics OSM semblait réussi, on ne pouvait pas ne pas remarquer en premier l’intérêt confirmé des ‘grosses boîtes’ pour OSM ainsi que la présence de beaucoup de professionnels ! S’il est normal de voir Mapbox ou Mapillary un peu partout à cet endroit, on écarquille un peu les yeux quand on voit aussi Facebook, Microsoft, ou Telenav et d’autres encore, non seulement sponsors de l’événement mais aussi présentant leurs équipes, leurs engagements, ou leurs réalisations dans OSM ! OSM devient une sorte de pivot, que personne ne veut négliger (en ligne de mire, le marché de la navigation routière ?), Apple était là aussi. Et pour ces acteurs de premier plan, une orientation vers l’analyse et l’amélioration de la couverture et de la qualité des données, un peu de ‘green-washing’ peut-être, mais aussi un intérêt certain pour les données et le modèle OSM !
En deuxième, arrivent aussi, et en partie du fait de ces acteurs majeurs, des méthodes et/ou outils d’IA : reconnaissance automatique d’images, traitement automatique d’imagerie aérienne, data-science. Plusieurs présentations montrant les possibilités offertes par le Machine Learning pour améliorer la donnée OSM (des explorations très actives de ces techniques), souvent comme pré-traitements automatisés, avant de faire appel à des vérifications ou validations manuelles de la communauté OSM (mais parfois des “communautés” professionnelles : organisées, managées, payées). Grande efficacité sur les tâches fastidieuses de la contribution grâce à ces techniques mises en œuvre et des réalisations très applaudies.
En troisième, les centres d’intérêts récurrents sur OSM : sur la thématique des transports par exemple, sur la diversité (homme/femme) des publics et des contributeurs OSM, sur l’analyse des données. Là encore, les différentes présentations étaient riches en retours d’expériences de tous horizons, signe que ces sujets sont encore au centre de la communauté.
En quatrième, l’amélioration continue des outils de contribution et du schéma de données. On notera les efforts menés par les différentes équipes de développement pour proposer toujours une meilleure expérience utilisateur, de nouvelles fonctionnalités, ou adapter l’architecture cœur du projet pour soutenir son développement sur le long terme.
En dernier, souvent le côté très sympa, offert par la liberté qu’offre OSM, la richesse de l’écosystème : un peu de tout, du rêve, des artistes, des communautés vivantes, des militants, des artisans engagés au service des autres et du bien commun !
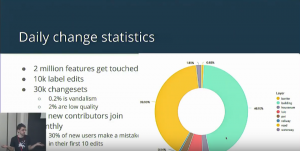
Le vandalisme sous différentes formes (graffiti, obscénités, publicités, …) ne représente que 0.2% des modifications, mais 2% des éditions sont de mauvaise qualité (les nouveaux contributeurs en sont responsables sur 30% lors de leurs 10 premières contributions, sachant qu’il y a 20 000 nouveaux contributeurs par mois).
Photo 4 : daily change statistics (surveillées par MapBox)
Pour prendre en compte ceci, Mapbox met en place des outils pour analyser et détecter les changesets suspects, et les corriger avec une intervention humaine, et à travers la plateforme https://osmcha.mapbox.com/.
http://www.hanshack.com/pointnemo/ visualise les points en Allemagne situés le plus loin possible d’une route, ceci pour savoir où trouver de la tranquillité !
http://www.hanshack.com/sorted-cities, proche d’un travail qui avait été réalisé par un contributeur français sur les cathédrales, cette réalisation présente des posters de formes de bâtiments (écoles, lieux de cultes, prisons, …) du plus grand au plus petit.
Sebastian Meier fait un travail de data-visualisation et a par exemple cherché à présenter nos distorsions cognitives sous formes de distorsion de cartes, voir l’ensemble de ses réalisations à partir de http://www.sebastianmeier.eu/
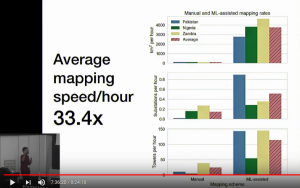
Mise en œuvre de l’IA pour détecter automatiquement à partir d’imagerie aérienne, le réseau de transport électrique (pylônes, transformateurs, …) dans 3 pays : Pakistan, Nigéria, Zambie. Ces techniques de Machine Learning permettent d’améliorer l’efficacité des contributeurs OSM d’un facteur 33 (!), en préparant toute la partie fastidieuse (sélection des images susceptibles de contenir des objets du réseau électrique, pointage dans l’image de l’objet à mapper) au contributeur qui n’a plus que le mapping proprement dit à réaliser, et un travail de contrôle.
Photo 5 : Efficacité du Photo 5: Machine Learning dans le mapping du réseau électrique
Ces techniques sont reproductibles dans d’autres domaines. Ce travail spécifique est financé par la World Bank et par ailleurs https://www.developmentseed.org/ réalise beaucoup d’autres choses.
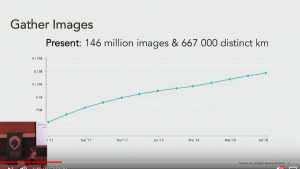
Telenav et OpenStreetCam présentent la méthode mise en place pour analyser automatiquement et à grande échelle les images d’OpenStreetCam (qui contient actuellement 146 millions d’images) :
Photo 6 : Évolution du nombre d’images dans OpenStreetCam
Si l’œil humain est très bon pour analyser les images, analyser des grandes quantités d’images prend énormément de temps et est très fastidieux. Donc reconnaissance automatique d’images par de l’AI. Une vingtaine de personnes est employée à analyser des images pour en repérer des motifs (feux tricolores, panneaux routiers, …), ceci pour créer des ensembles de données-témoins (‘tagged datasets’) au travers d’un outil ad-hoc : l’opération consiste à créer un rectangle autour de l’objet identifié (par exemple un ‘feu de circulation’) et de le qualifier comme tel (‘feu de circulation’ dans notre exemple).
Photo 7 : outil pour aider à la constitution de l’échantillon d’apprentissage
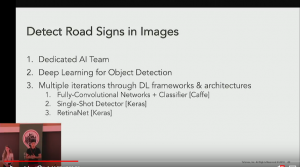
Cet ensemble témoin étant constitué, l’apprentissage peut commencer (DeepLearning). Plusieurs solutions sont utilisées pour finalement être capable de reconnaître automatiquement et très rapidement plus de 55 types de signalisation routière.
Photo 8 : technologies AI utilisées par Telenav
Mais l’équipe de Telenav ne s’en tient pas là : ils souhaitent aussi rapprocher les résultats obtenus avec des valeurs de tags dans OSM, par exemple pour vérifier qu’un panneau de limitation de vitesse à 30 km/h correspond bien à une voie avec le tag “maxspeed=30”. Plusieurs difficultés ont été surmontées : déduire de différentes paramètres la localisation exacte de l’objet en fonction de la localisation de la prise de vue de l’objet, regrouper les résultats de plusieurs photos pour identifier lorsque cela est possible un seul objet et le localiser à un seul endroit, et enfin identifier la voie sur laquelle l’objet s’applique pour enfin pouvoir comparer les tags de la voie avec l’objet reconnu sur les images !
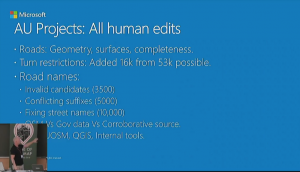
Un peu de green-washing pour Microsoft (MS a racheté github récemment et se présente comme étant l’acteur contribuant le plus dans les projets OpenSource au monde) ? Mais intéressant quand même de voir de quelle manière MS prend le virage OSM. L’équipe OpenStreetMap de Microsoft est constituée de 18 personnes (Seattle et Serbie), est très récente (nov 2017) et s’est fixé comme objectif de travailler à l’amélioration de la qualité et la couverture de la carte routière de l’Australie. C’est de la contribution manuelle en équipe, managée et organisée, en utilisant les outils de la communauté OSM (éditeurs, osmose, osmcha, etc.) :
Photo 9 : travail de Microsoft sur le réseau routier australien
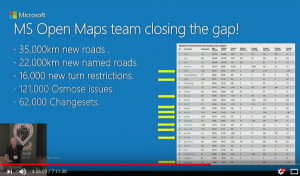
En un an environ, ils sont arrivés à certains résultats :
Photo 10 : résultat Microsoft sur le réseau routier australien
OpenStreetMap c’est bien plus qu’une carte, ce sont des données géographiques ! Cette présentation de Tobias Knerr était l’occasion de voir qu’on peut aller plus loin en proposant du rendu 3D à partir des données OSM, à l’aide de l’outil OSM2World. L’occasion de montrer le fonctionnement de l’outil, et surtout les nombreux types d’objets gérés : bâtiments, occupation du sol, routes et voies ferrées, bancs et panneaux publicitaires… Si vous avez envie d’apporter votre expertise, que ce soit en modélisation 3D, ou sur une thématique spécialisée d’OSM, le projet est ouvert et l’équipe recherche des contributeurs.
Photo 12: Le ‘Tasker’ de Facebook dans lequel trois acteurs se succèdent en trois phases : l’édition, la vérification, et la publication, ceci pour garantir la qualité
Dans la série retours d’expériences de grandes entreprises, Facebook, qui était déjà intervenu lors de la précédente édition au Japon, montre ses avancées en matière de contribution à OpenStreetMap. Le réseau social a développé de nombreux outils pour détecter automatiquement le réseau routier à partir de photographies aériennes (là aussi à partir d’IA), et mis en place un ensemble de procédures de validation et intégration manuelle des données, en lien avec les communautés locales, afin de compléter OSM. Cela a aboutit à 244 000 kilomètres de routes ajoutés en Thaïlande et d’autres pays. La société utilise désormais OpenStreetMap comme source de données dans ses applications principales sur 3 quarts des pays de la planète, pas mal comme réutilisation !
Photo 13: les pays facebook qui utilisent OpenStreetMap
Photo 14 : quelques dispositifs publicitaires qui peuvent être mappés dans OSM avec le tag ‘advertising’
Les dispositifs publicitaires sont des objets omniprésents dans l’espace public. Une réglementation très précise (et très compliquée) existe, en France en tout cas, pour contraindre leurs dimensions/nombres/lieux d’installation etc. mais celle-ci n’est souvent pas respectée, en cause une certaine passivité des pouvoirs publics, occupés à autre chose, et surtout des publicitaires/annonceurs, sans complexes, qui cherchent à en profiter au maximum, et se croient souvent au-dessus des lois. Par ailleurs un certain activisme associatif et citoyen existe en France pour défendre le cadre de vie, et lutter contre la pub. Pour permettre à tous de participer à la défense du paysage, bien commun de la nation, contre l’invasion des dispositifs publicitaires, il serait utile d’inventorier et qualifier ces dispositifs, et OSM est l’outil parfait pour ceci ! Cet inventaire permet de sensibiliser le public et les pouvoirs publics à cette pollution visuelle, et permettrait à terme de disposer des données nécessaires pour évaluer les politiques publiques locales en terme de publicité extérieure. Dans cette idée, un contributeur grenoblois nous présente comment qualifier ces dispositifs publicitaires dans OSM, et les outils de contributions existants pour faciliter cette tâche. La France, particulièrement soumise à cette pollution au quotidien, a commencé à référencer ces dispositifs publicitaires, mais tant reste à faire ! Au niveau international cet inventaire est encore très balbutiant, l’occasion donc de se lancer, essayez vous aussi d’utiliser le tag ‘advertising’ ! La cartographie des dispositifs publicitaires pour la défense du paysage.
Photo 15: Pic4Review organise, automatise et facilite la contribution à partir de photos
Afin de faciliter la réutilisation des photos de rues libres de droits issues de Mapillary, OpenStreetCam et Flickr, Adrien Pavie nous présente l’outil Pic4Review. Il s’agit d’un nouvel éditeur OSM qui facilite l’ajout de détails sur des objets existants à l’aide de photos. Le principe est simple : on choisit une mission sur une zone, et chaque objet à compléter est présenté avec les photos disponibles aux alentours. On peut par exemple renseigner si un passage piéton est accessible en fauteuil roulant, si un arrêt de bus est abrité, le type de parking à vélo… La contribution est rendue ludique par un système de points et un tableau des meilleures contributions par thématiques. Le projet est ouvert aux contributions, que ce soit retours d’utilisateurs, traductions ou développement de nouvelles fonctionnalités !
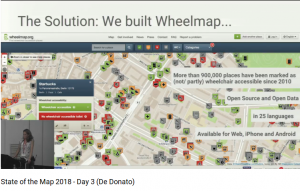
Le site wheelmap.org a été crée il y a 8 ans pour améliorer l’information (et donc la vie quotidienne) des personnes à mobilité réduite souvent dans l’inconnu sur l’accessibilité des lieux. Depuis, le tag ‘wheelchair’ a été utilisé plus de 1,3 millions de fois dans la base de données OSM, et permet maintenant de connaître le niveau d’accessibilité de plus de 900 000 lieux, grâce à l’implication de nombreuses communautés. Ce tag a été depuis enrichi de nombreux nuances. Par ailleurs cette problématique universelle de l’a11y (accessibility) est partagée par de nombreux groupes militants à travers le monde. Mieux encore, les données d’accessibilité de différentes sources sont maintenant agrégées et rendues disponibles à travers une infrastructure commune (accessibility.cloud), donnant accès à travers une API unique et un modèle de donnée très détaillé, à plus de 1,6 millions de lieux, et leurs caractéristiques d’accessibilité. Sur cette API, la startup parisienne I Wheel Share (présentée par son CTO Florian Lainez) développe des services, et notamment Wilson, un chatbot capable de répondre à toutes sortes de questions pratiques, et de localiser par exemple les ressources (toilettes, cinémas, services) à proximité et accessibles aux PMR. De nombreux partenaires sont impliqués dans le développement de cette startup.
Une utilisation militante et sociale très intéressante d’OSM !
Photo 16 : la solution Wheelmap apporte beaucoup d’informations sur l’accessibilité
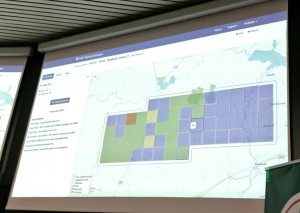
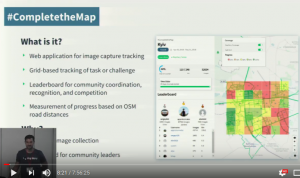
Présentation des nouveautés de Mapillary, qui rappelons-le est une plateforme contributive collectant des photos géo-localisées du monde entier, ces photos contribuées par la foule sont ensuite mise à la disposition de tous sous une licence libre (CC-BY-SA) et sont particulièrement appropriées pour aider à la contribution OpenStreetMap. Actuellement 326 millions de photos dans leur DB. La plateforme (et son ‘Tasker’) permettent d’organiser la contribution “photo” à l’échelle d’un territoire découpé en zones sur lesquelles est rendue visible la progression de la contribution. Pour dynamiser l’utilisation, Mapillary a recours à des concours #CompleteTheMap et de la gamification.
Photo 17 : Tasker de la plateforme Mapillary
Pour revenir à la contribution OSM, ces photos sont visualisables sur leur plateforme (un exemple, même exemple plus près) et aussi dans l’éditeur ID.
Mapillary fait de la reconnaissance automatique de modèles dans les images et est capable alors de sélectionner les photos avec un certain modèle (par exemple des passages piétons), mais une très grande quantité de modèle sont reconnus (parmi lesquels ‘Billboard’ voir ci-dessous).
Photo 18 : reconnaissance automatique de ‘Billboard’ (à droite mi-hauteur) avec la plateforme Mapillary
La plateforme Mapillary permet aussi d’autres modes de contribution, par exemple pour contrôler que leur moteur de reconnaissance d’images marche effectivement bien pour les panneaux de signalisation routière.
Mapillary fait un business de ces compétences dans le domaine, mais joue le jeu de la communauté OpenStreetMap en permettant la réutilisation des images téléversées par les contributeurs bénévoles, et en offrant des outils de contribution très avancés.
Une présentation originale d’un contributeur issu du Grand Duché (du Luxembourg) qui s’intéresse aux modes de transports rares des piétons et au calcul des itinéraires qui les empruntent, les moteurs d’itinéraires classiques les ignorant la plupart du temps. Quelques exemples : route=ferry (bac prenant des piétons), bridge=movable+bridge:movable=transporter (voir photo ci-dessous), conveying=*+highway=footway ou highway=step (tapis ou escalier roulant), highway=elevator (ascenseur), route (ou railway)=funicular (funiculaire), aerialway=cable_car ou aerialway=gondola (transport par câble en ville, appelés à se développer)… Bref l’idée est de savoir prendre en compte tout ça et de savoir favoriser soit le temps de transport, soit le coût, soit la distance…
Photo 19 : la nacelle qui circule à Bilbao et qui permet d’éviter aux piétons un détour de 10 km, 12 ‘flying ferries’ existent comme celui-ci dans le monde (dans OSM).
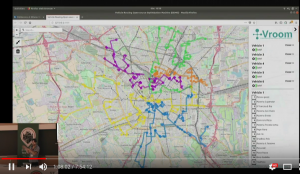
La solution VROOM s’attaque aux problèmes d’optimisation d’itinéraires pour les flottes de véhicules, en se basant sur les données OpenStreetMap, et le calcul d’itinéraires OSRM : commencer par résoudre le problème ‘classique’ de la tournée du facteur, mais aussi les variantes avec des contraintes de capacité, de temps, de point de départ ou d’arrivée, de flotte de véhicules, etc. Du calcul, des heuristiques, des règles ad-hoc, et des ajustements assez sioux permettent d’optimiser la solution, et de calculer rapidement, ceci pour permettre la montée à l’échelle. Voir https://verso-optim.com/
Photo 20 : Julien Coupey montre un exemple de calcul de la tournée de tous les restaurants de Milan par une flotte de 5 véhicules partant tous du même endroit
IV. En conclusion
Cette édition 2018 du State of the Map a été, comme chaque année, un brillant succès. L’événement a réuni les contributeurs OSM de tous horizons et les nouveaux acteurs qui s’intéressent au projet, le tout dans le prestigieux cadre de l’école Polytechnique de Milan. La communauté se montre toujours aussi innovante dans les cas d’usages et les outils proposés autour des données.
La prochaine édition se tiendra à Heidelberg en Allemagne, du 21 au 23 septembre 2019. Nous espérons vous y voir nombreux !
Du 6 au 8 juillet s’est tenu à Nantes le Nantes Maker Campus, un événement qui regroupe des makers en tous genres – du fabricant d’une 2 CV en bois au club des R2D2 Builders – et de tous horizons, certains venant des Pays-Bas spécialement pour l’événement.
Démo du bicinéma avec le V4MBike sur le stand OpenStreetMap au Nantes Maker Campus
En bons makers de cartes, les mappers nantais étaient présents pendant les trois jours sous une canicule plus propice à la carto indoor climatisée. Nous y avons présenté le fameux V4MBike de Stéphane, assorti du bicinéma de Corentin. Pour celles et ceux qui n’étaient pas aux Rencontres State of the Map France à Pessac début juin, ces dispositifs méritent quelques explications.
Le boitier du V4MBike
Le V4MBike est un système de 4 action cams couplées à une antenne GPS, montées en haut d’une perche installée sur un vélo. Les cams sont contrôlées par un Arduino qui déclenche les 4 photos simultanément, ce qui permet de les assembler en une photo 360°. Un Raspberry Pi collecte la trace GPS et pilote le tout, via un tableau de contrôle fixé au guidon. Il est ainsi possible de prendre automatiquement une photo à intervalles de temps ou de distance réguliers, par exemple tous les 10 mètres.
Le bicinéma (ou vélociné) est un vélo monté sur un trainer qui permet de voyager sur place. Un coup de pédale et la roue entraîne le défilement des photos sur un écran. Cette vidéo postée sur Twitter vaut mieux qu’une longue explication. Bien sûr nous avons choisi de montrer une séquence de photos réalisées avec le V4MBike, lors de notre trajet à vélo de Nantes à Bordeaux fin mai. Bravo à Gilles qui a ainsi parcouru plusieurs fois la route de Blaye à Bordeaux, en transpirant à grosses gouttes sous la fournaise des Nefs Dubigeon.
Joshua explique OSM avec enthousiasme
Ce vélo unique au monde a attiré bien des curieux et curieuses, à qui nous avons expliqué que nous faisons mieux que Street View, car d’une part nous partageons les photos en les déposant sur Mapillary sous licence libre, d’autre part nous les utilisons pour compléter la meilleure carte du monde, également partagée. Un écran montrant les contributions en quasi temps réel, avec Show Me the Way, fait toujours son petit effet, le travail d’Éric l’orfèvre de la cartographie aussi !
Bilan du week-end : nous avons fait découvrir OSM à plusieurs dizaines de personnes, distribué flyers et stickers, et récolté une quinzaine de contacts que nous tiendrons informés de nos ateliers mensuels. L’un d’eux est déjà venu à la rencontre du mardi suivant : et un nouveau mapper, un ! Nous avons également échangé avec un mapper de Saint-Nazaire qui tenait un stand pour présenter le futur fablab de la ville portuaire : nous prévoyons d’y organiser une cartopartie l’année prochaine.
Merci à toutes et à tous pour votre participation !
Retour en chiffres :
221 personnes inscrites
Autour de 80 conférences et ateliers, (soit plus de 50 heures !) dont une trentaine enregistrées que vous pouvez retrouver sur notre nouvelle instance Peertube
Un grand merci à l’équipe en bleue, les bénévoles qui ont préparé, animé, accompagné, rangé …
___
Et pour pouvoir pratiquer des tarifs abordables, grand merci aux 17 partenaires et soutiens avec un clin d’œil au dernier mécène de ce millésime, à savoir les participants eux-même. En effet, nous avons proposé cette année de pouvoir donner volontairement plus que 10€ pour s’inscrire aux 3 journées, permettant aux participants d’être le second soutien le plus important de la manifestation. Merci à toutes et tous donc, entreprises, collectivités et citoyens !
À l’année prochaine !
Parlons en d’ailleurs de 2019 ! Cela va se passer ici
Cher.e.s ami.e.s et membres de l’association OpenStreetMap France, cher.e.s contributeurs.trices,
Comme chaque année depuis la création de l’association OpenStreetMap France, la rencontre annuelle SotM-FR, qui se tiendra cette année à Bordeaux, les 1, 2 et 3 juin, est l’occasion de tenir notre assemblée générale ordinaire.
Cette année, il est prévu que notre assemblée générale se tienne le samedi 2 juin à 17h30 (horaire à confirmer).
Afin de préparer cette échéance dans les termes que nos statuts prévoient, nous vous remercions dès à présent de prendre acte de la présente convocation.
L’entrée est bien sûr libre et ne nécessite pas d’inscription au SotM-FR.
Comme tous les ans, le Conseil d’Administration sera renouvelé lors de cette assemblée générale. A ce sujet, nous vous rappelons que les candidatures doivent être envoyées au Conseil d’Administration au moins 15 jours avant la tenue de l’assemblée générale, soit le vendredi 18 mai à minuit au plus tard. Les motions éventuellement doivent aussi parvenir dans le même délais.
Ordre du jour (en cours)
présentation et vote du rapport d’activité 2017
présentation et vote des comptes financiers de l’exercice 2017
renouvellement du Conseil d’Administration.
montant des cotisations 2018-2019
s’il y a lieu, présentation et vote des motions
questions diverses (sans vote)
Les détails de l’ordre du jour (rapports, liste des candidats) seront publiés dans les jours à venir.
Votes
Les votes à distance seront ouverts une semaine avant l’AG et jusqu’au jour de l’AG (samedi 2 juin) à midi et se feront par la messagerie interne OSM qui permet l’authentification des expéditeurs. Votre vote est à envoyer à association. Tout membre à jour de cotisation (c’est-à-dire ayant cotisé depuis la dernière Assemblée Générale) pourra participer aux votes.
Nous vous remercions de bien vouloir régler votre cotisation dans les meilleurs délais afin de pouvoir participer aux votes sur place ou en ligne.
Le vote par délégation est possible, un mandataire ne pouvant recevoir plus de deux mandats. Les mandats sont à envoyer par messagerie interne OSM.
Si vous êtes à la recherche d’une solution pour vous passer des services cartographiques de Google suite à l’augmentation des tarifs, nous avons quelques pistes pour vous !
L’écosystème OpenStreetMap regorge d’outils libres et d’acteurs compétents pour vous permettre de retrouver votre indépendance.
En fonction de votre usage et de votre niveau de connaissances, vous aurez le choix entre plusieurs options
utiliser les données libres du projet OpenStreetMap ainsi que les nombreux outils opensource existants pour prendre votre indépendance et créer vos propres services cartographiques.
Consultez notre page dédiée à l’utilisation des données OpenStreetMap pour commencer. De nombreux prestataires fournissent des formations sur OpenStreetMap qui vous permettront de gagner un temps précieux.
utiliser les services gratuits mis en place par OpenStreetMap France ou d’autres acteurs bénévoles de la communauté.
Cela ne s’applique que si vous comptez en faire un usage modéré.
Dans tous les cas, pensez à soutenir le projet et sa communauté en faisant un don ou en adhérant à l’association OpenStreetMap France 😉
Cet accord formalise la relation entre la fondation internationale et un groupe régional (ou thématique), sans modifier le fonctionnement ou la nature de l’une ou de l’autre.
Le chapitre et la fondation s’efforcent de se soutenir mutuellement dans leurs activités et partagent les mêmes objectifs déclarés en faveur du projet OpenStreetMap.
Les deux entités communiquent un rapport d’activité et un rapport financier annuels.
La fondation accorde le droit officiel pour l’utilisation du nom OpenStreetMap France et du logo avec la loupe OpenStreetMap.
L’utilisation des marques liées à OpenStreetMap (« OpenStreetMap », « OSM », « OpenStreetMap Foundation », « OSM Foundation », « OSMF », « State of the Map », « SOTM ») peut être discutée entre la fondation et le chapitre, ainsi qu’une possibilité de représentation mutuelle.
Un membre de OpenStreetMap France, Christian Quest, prend un siège au conseil consultatif de la fondation. Ce groupe est constitué de représentants des entreprises (membres de la fondation) et des chapitres locaux.
C’est aussi l’occasion de présenter ou rappeler les activités de l’association OpenStreetMap France à la communauté globale dans un billet de la fondation. En voici un extrait : OpenStreetMap France a été créée en 2011 en tant qu’association à but non lucratif et indépendante. Au fil des ans, elle a accompli de grandes choses, notamment l’hébergement de certains services importants pour les utilisateurs français, mais aussi pour l’écosystème mondial d’OpenStreetMap:
Le style OSM France de carte Mapnik, une déclinaison du style ‘standard’ OSM-carto, avec des éléments spécifiques français. Il a aussi innové en repoussant le zoom au niveau 20 et en ajoutant ces superbes terrains de sport ! Le style « humanitaire » est également hébergé sur leurs serveurs, ainsi que d’autres couches de tuiles cartographiques et couches d’information.
La principale instance du service ‘uMap’ qui vous permet d’ajouter vos propres marqueurs ou d’importer vos propres données pour créer et partager une carte personnalisée (il existe maintenant d’autres instances et ce logiciel libre peut être déployé à volonté). Ce formidable outil de démocratisation de la carte et des données OSM est apprécié par un large public.
L’outil de qualité et d’intégration Osmose qui peut afficher un large éventail de problèmes de qualité détectés automatiquement, proposer des intégrations à partir de données externes ouvertes et même de montrer les éléments suspects dans « vos » données !
Bien sûr, elle héberge également le site openstreetmap.fr dont une nouvelle version est en cours de développement, ainsi qu’un forum francophone. Elle soutient des projets comme OpenLevelUp, Caribe Wave/HAND, et Jungle Bus. Grâce à ces services et à des actions de communication, les membres de l’association assurent une constante promotion pour OpenStreetMap en France, établissant des liens avec d’autres associations, les citoyens, les collectivités locales, les petites et grandes entreprises, l’Institut national de cartographie (IGN), La Poste et toute personne cherchant un point d’entrée au sein du projet OSM et de la communauté. Il y a quelques mois, l’association et ses membres ont été officiellement reconnus comme un chapitre local de la Fondation OpenStreetMap.
Pour les journées européennes du patrimoine 2017, les contributeurs OpenStreetMap d’Ille-et-Vilaine ont réalisé une cartographie du Musée de Bretagne (Rennes) et de ses oeuvres majeures. Une contribution innovante puisque peu de musées sont encore cartographiés précisément en intérieur dans OSM.
Le Musée de Bretagne est un musée de société et d’histoire, situé au centre de Rennes, qui retrace l’histoire des populations de Bretagne, de la préhistoire à nos jours. À l’occasion des journées européennes du patrimoine, la communauté OpenStreetMap d’Ille-et-Vilaine s’est mobilisée, le temps d’un week-end, pour cartographier le parcours permanent du musée et ses oeuvres majeures. Comme OpenStreetMap est au départ une base de données géographique pour les données extérieures, il a fallu faire preuve d’inventivité pour parvenir à recenser les espaces intérieurs du musée. Afin de favoriser la reproductibilité de la démarche, cet article retrace la manière dont s’est déroulé ce projet audacieux.
OSM et la cartographie d’intérieur
Lancé en 2004, OpenStreetMap avait pour vocation initiale de recenser de l’information géographique visible depuis l’extérieur : routes, bâtiments, occupations du sol… Mais depuis 2011, la question se pose de comment représenter les espaces intérieurs accueillant du public : gares, aéroports, centres commerciaux, établissements culturels. Depuis 2014, la communauté OSM dispose d’un ensemble de tags satisfaisants pour décrire les structures intérieures : salles, couloirs, escaliers.
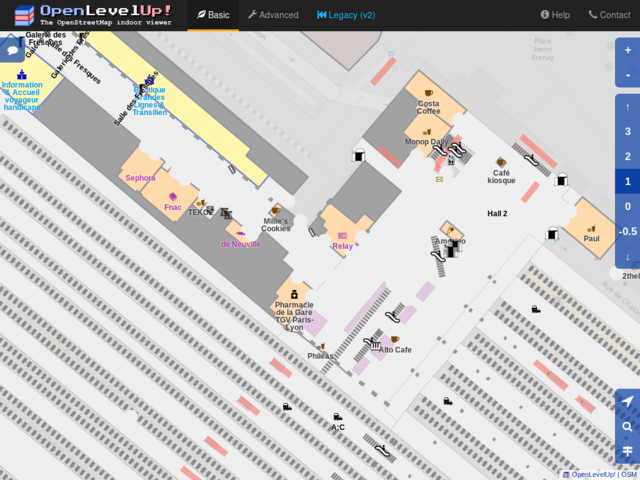
Avoir des données c’est bien, mais pouvoir les visualiser, c’est mieux. Comme la cartographie d’intérieur doit pouvoir gérer des bâtiments à plusieurs étages, le rendu à plat de la carte principale n’est pas suffisant pour comprendre un espace intérieur. On ne peut pas pour l’instant choisir un étage et en voir la structure, tous les niveaux sont confondus, ce qui laisse place à une certaine confusion. La carte interactive OpenLevelUp a été créée par Adrien Pavie en 2015 pour permettre la bonne visualisation de ces nouvelles données.
En parallèle, de nombreuses initiatives de collecte de données ont été lancées, la plus majeure en France concernant les gares SNCF Transilien en Île-de-France. Et pour en revenir aux musées, le Louvre a été partiellement complété. Qu’en est-il des autres musées français ?
En mai 2017, des premiers échanges ont eu lieu entre la communauté rennaise OpenStreetMap et le Musée de Bretagne, afin de discuter des possibles. Rapidement l’idée de cartographier l’intérieur du musée est évoquée, d’autant qu’elle fait sens dans la démarche de transition numérique du musée. L’institution réalise actuellement la numérisation de son inventaire, et a ouvert un site internet au public pour présenter ses objets et oeuvres. La création de liens entre la base OSM et le site du musée offrirait une expérience utilisateur intéressante aux visiteurs.
Cartographier les « murs » du musée
La première étape a consisté en la saisie de la structure du musée. Le Musée de Bretagne est localisé au premier étage des Champs Libres, le centre culturel de la métropole rennaise. Nous avons eu l’autorisation de la part du musée d’utiliser les plans de masse de celui-ci, ce qui facilite largement la tâche. Cette tâche est encore fastidieuse, à faire réaliser de préférence par des contributeurs aguéris. Le procédé est le suivant :
Mettre les plans au format image : les plans communiqués étant en PDF, il est nécessaire dans un premier temps de les basculer dans un format image, comme par exemple du PNG. Cela peut être réalisé avec un éditeur d’images comme Gimp.
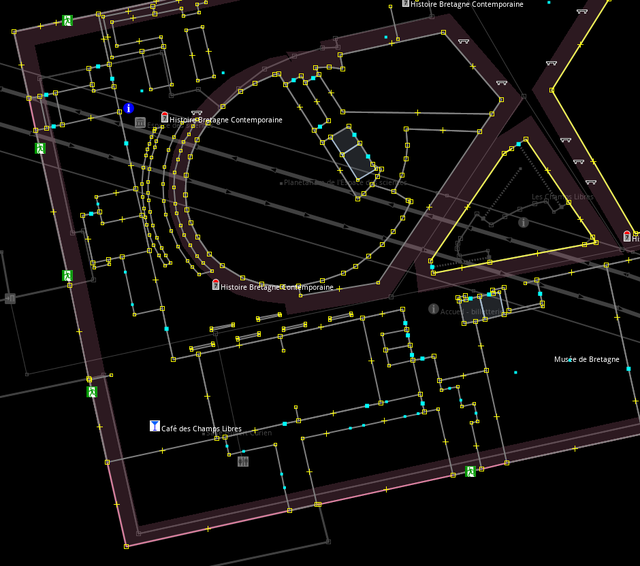
Charger le plan dans JOSM : à l’aide du plugin PicLayer, vous pouvez charger en fond le plan de masse. Il est également nécessaire de le géo-référencer, c’est à dire localiser le plan dans l’espace. Cela peut être fait en s’aidant de données telles que le Cadastre ou l’imagerie aérienne.
Tracer les contours des espaces : en s’aidant du plan, retracer les contours des salles, murs, couloirs, portes… du bâtiment. Il faut indiquer sur chaque objets les tags adaptés, et ne pas oublier d’indiquer l’étage auquel ils se trouvent avec la clé level=*.
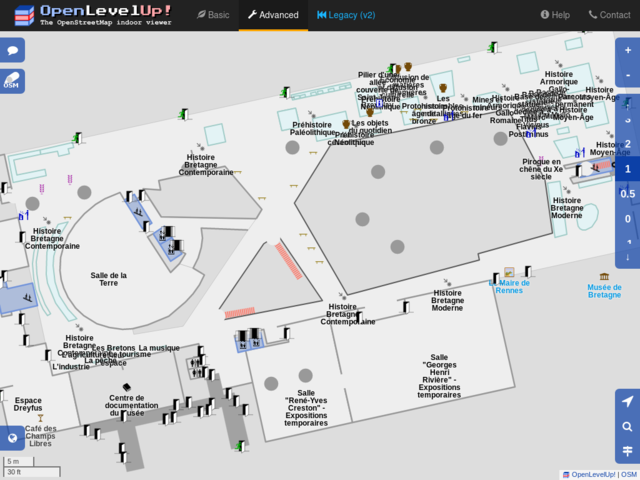
Envoyer sur OSM et vérifier : envoyez vos modifications, et vérifiez avec OpenLevelUp si la structure correspond au plan. Il faut attendre quelques minutes pour que les données soient visibles.
Maintenant que nous avons les murs intérieurs, il est possible de localiser précisément les objets qui se trouvent au sein du musée.
Typologie et recensement des oeuvres
Le Musée de Bretagne est un musée de Société et d’Histoire, dont la vocation est de raconter l’histoire de la population sur le territoire couvert. Ce type de musée peut contenir des oeuvres d’arts, telles que des peintures ou sculptures. Mais ils présentent largement les objets du quotidien utilisés à travers différentes époques, tels que des habits, pièces de monnaies, flèches, pierres gravées… Le wiki d’OpenStreetMap propose une description plutôt exhaustive des objets artistiques, mais pas de ces objets du quotidien qui ont désormais une valeur artistique. Après des discussions riches entre la communauté locale et l’équipe du musée, il est ressorti que le terme « artéfact » (artifact en anglais) se prêterait le mieux pour décrire ces objets. Il est utilisé entre autres par les musées canadiens. Nous avons donc écrit une proposition de tag historic=artifact pour couvrir ces objets.
Comme la cartographie intérieure des musées n’est pas encore largement répandue, nous avons consacré une partie du temps de l’atelier à rechercher, documenter et présenter les tags qui peuvent être utiles dans cette démarche. L’idée étant de faciliter la tâche lors de prochains ateliers du même type. D’ailleurs, ces propositions étant nouvelles, vous pouvez venir en discuter sur les pages du wiki pour les améliorer.
Nous avons ensuite collecté des données sur la localisation des oeuvres principales du musée. Ce recensement s’est fait en collaboration avec les contributeurs Wikimédia, également présents lors de ces journées du patrimoine. Une partie des éléments a été saisie suite à ce recensement, mais la tâche étant vaste, il reste encore beaucoup à faire !
Résultats
Après ces deux après-midi d’ateliers, et la dizaine d’heure préparatoire aux ateliers, la communauté a concrètement réalisé :
Pour la suite, nous allons continuer notre collaboration avec le Musée de Bretagne, et nous souhaitons également créer du lien entre le catalogue en ligne du musée, la description des objets côté Wikidata (base de connaissances libre) et OpenStreetMap.
En conclusion
Les journées européennes du patrimoine ont été l’occasion pour la communauté rennaise de montrer son savoir-faire en cartographie d’intérieur, en proposant le recensement des oeuvres du Musée de Bretagne. Notre démarche a été documentée pour inciter d’autres communautés à s’emparer du sujet et également se lancer dans ce type de projets. Nous avons pu également promouvoir le projet OpenStreetMap de manière plus large à un public de curieux.